 Sketches of effect of "rear wheel push" design.
The trigonometry of a possible design. As The Fresh
Prince once said, or maybe didn't, "Get Triggy With It!" (Big up to my students who groan over my jokes.)
Sketches of effect of "rear wheel push" design.
The trigonometry of a possible design. As The Fresh
Prince once said, or maybe didn't, "Get Triggy With It!" (Big up to my students who groan over my jokes.)
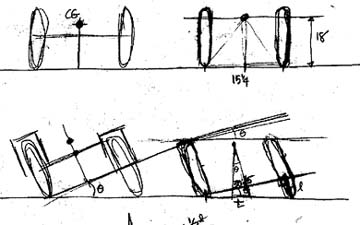
One of the possibilities was an active tilting mechanism that would "push" the outside rear wheel down relative to the frame. The effect would be to lift the rear corner, while widening, a little, the track width, and shifting, a little, the cg toward the inside of the turn.
The result? A 12" lowering of a rear wheel (a 12" lift of a rear corner, therefore) would tilt the frame about 22 degrees, pitch it forward about 5 degrees, would widen the track by about 3", raise the cg by about 6", though it would also shift it toward the center of the turn by about 7". The combination of the shifting and lifting would have given the equivalent stabilty of a 48" track width; impressive compared to the 30.5" width untipped. It brings the theoretical topple acceleration from 0.6g up to about 1.0g.
There are reasons why I chose not to do this, not least of which is the difficulty in delivering torque to the rear wheel while pushing it around. Not to mention, "Automatic" tilt control (lateral acceleration is sensed, and actuators force the chassis into leaning) still hasn't won me over.
